Main /
DM542T Digital Stepper Drive
Data Needed for the HAL / INI Files
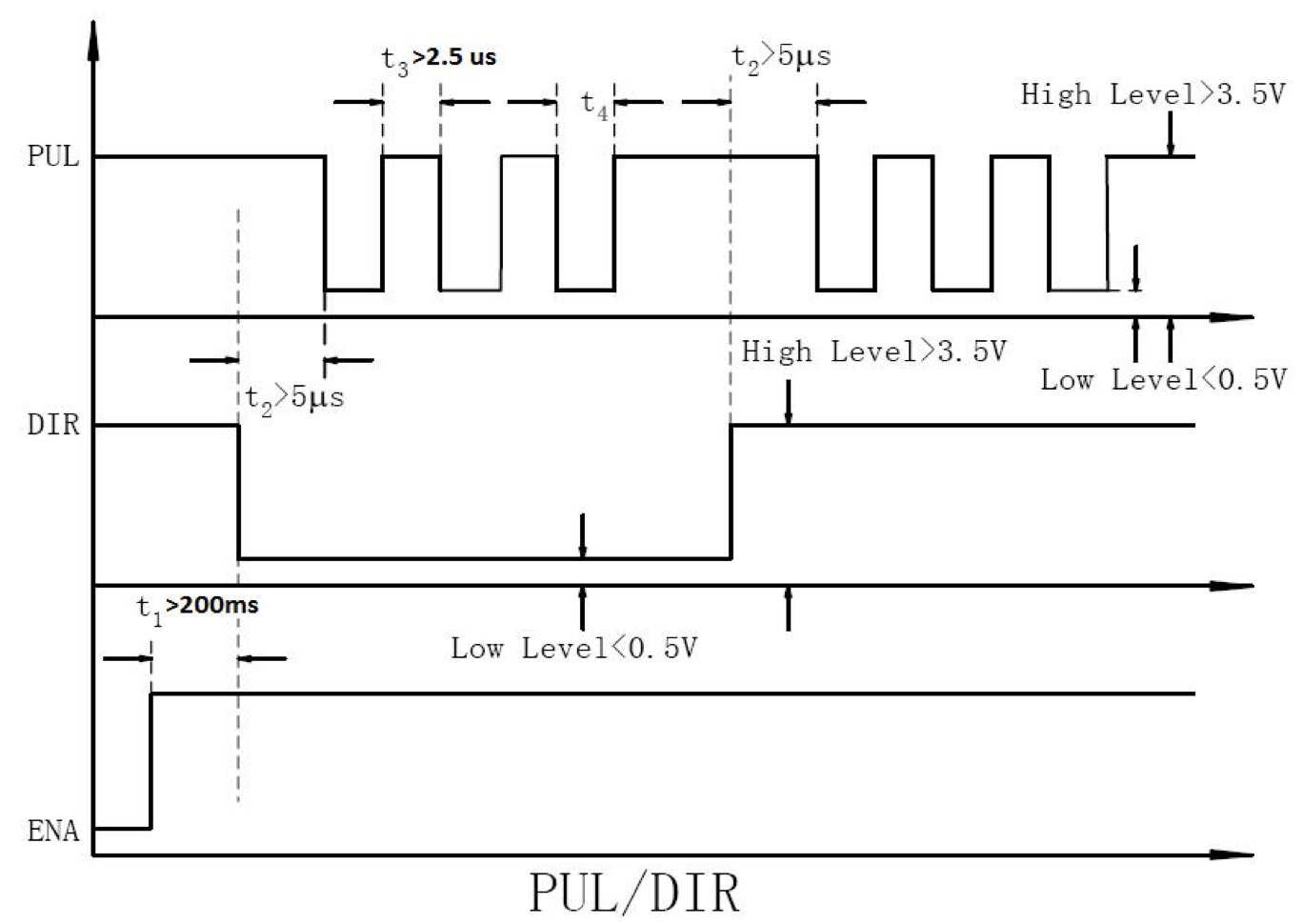
Sequence chart of control signals
Based on the chart to the right, the HAL configuration settings are:
- These are 5 μs = 5,000 ns
- DIRHOLD = 5000
- DIRSETUP = 5000
- These are 2.5 μs = 2,500 ns
- STEPLEN = 2500
- STEPSPACE = 2500
That data seems to be a deprecated way to enter the data.
Max jitter was measured on the Raspberry Pi using the command,
latency-test
From that testing, the max jitter on the base thread was 16.4 μs. (See also, https://linuxcnc.org/docs/stable/html/install/latency-test.html.)
Using the data from above for the Stepper Online DM542T Drivers
- Stability before stepping = 5.0 μs
- Step length (2.5 μs x 2) = 5.0 μs
- Stability after stepping = 5.0 μs
- TOTAL = 15.0 μs
Thusly,
- Base Period = 16.4 μs + 15.0 μs = 31.4 μs = 31,400 ns
For the Rosetta.ini file, the entry is:
- BASE_PERIOD = 31400
The full user manual is available.
| spacer line |
|
eMail comments to |